Планирование маршрута БПЛА: Расширенные алгоритмы оптимизации пути для дронов
Код программы и дизайн интерфейса графического пользовательского окна
1. Планирование маршрута БПЛА - Визуализировать схематический план карты для интуитивного понимания маршрута. - Настроить параметры алгоритма для повышения точности. - Адаптировать функцию стоимости для лучшей производительности. - Исследовать 3D-маршрут и план этажа для всестороннего обзора. - Нарисовать кривые итераций для отслеживания сходимости к оптимальному решению.
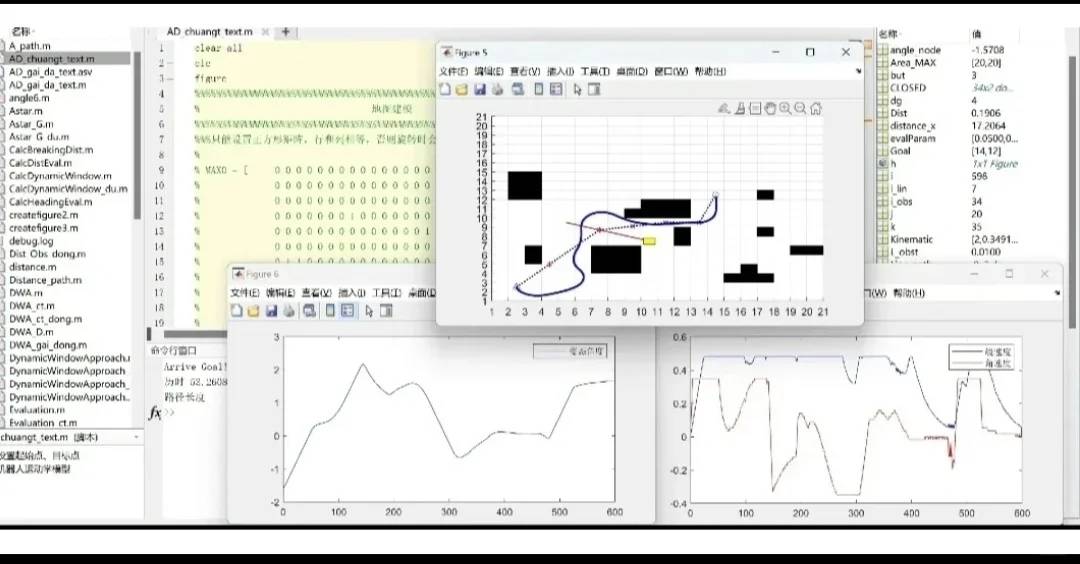
- Рассчитать наиболее эффективную стоимость DEGWO для упрощения операций. - Экспортировать координаты пути в трехмерном формате xyz для практической реализации.
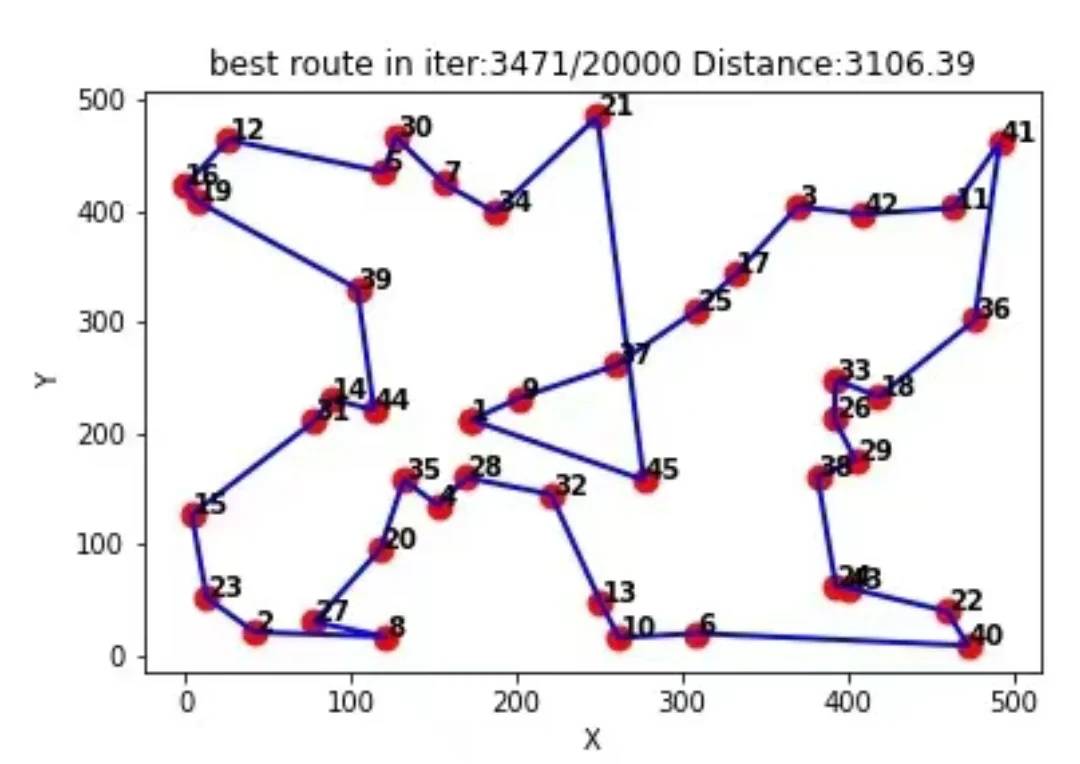
2. Решение задачи коммивояжера - Оптимизировать параметры алгоритма для обеспечения точных результатов. - Отобразить оптимальный путь с четкими визуальными элементами для легкого интерпретирования. - Проанализировать кривую итераций, демонстрируя связь между количеством итераций и значениями функции приспособленности. - Экспортировать координаты пути, отметив начальную и конечную точки для бесперебойной реализации.
3. Оптимизация разложения сигнала VMD - Улучшить параметры алгоритма для достижения превосходной четкости сигнала. - Представить исходные данные для контекста и сравнения. - Отслеживать кривую итераций, связывая количество итераций с значениями функции приспособленности для прозрачности. - Показать результаты разложения VMD с подробными выводами. - Подчеркнуть результаты расчетов, включая оптимальное значение альфа и идеальное количество разложений (K), для практически применимых выводов.
Это действительно интересная статья, особенно алгоритмы оптимизации маршрутов для дронов выглядят впечатляюще. Особенно полезным кажется возможность настройки функции стоимости и визуализации трёхмерных маршрутов.
Очень интересная статья, особенно про визуализацию маршрутов в 3D! Хотелось бы узнать подробнее, как именно работает настройка штрафной функции стоимости – есть ли примеры её применения в реальных проектах? Алгоритм DEGWO выглядит перспективно для коммерческого использования дронов.
Интересно, как алгоритмы учитывают ветер и другие погодные условия при построении маршрута? В 3D-визуализации было бы круто добавить слои с разной плотностью воздуха.
Параметры штрафных функций — ключевой момент, хотелось бы больше примеров из реальных кейсов.
Выглядит как мощный инструмент, особенно для промышленных дронов.