UAV経路計画:ドローンのための高度なパス最適化アルゴリズム
プログラム操作コードとそのGUIインターフェースのインタラクションデザイン
1. ドローン経路計画 - 直感的なルート理解のために地図スキーマを視覚化する。 - 精度を高めるためにアルゴリズムパラメーターを微調整する。 - コスト関数ペナルティの焦点を調整してパフォーマンスを向上させる。 - 包括的な視点を得るために3Dルートとフロアプランを確認する。 - 最適解に収束するための反復曲線を描く。
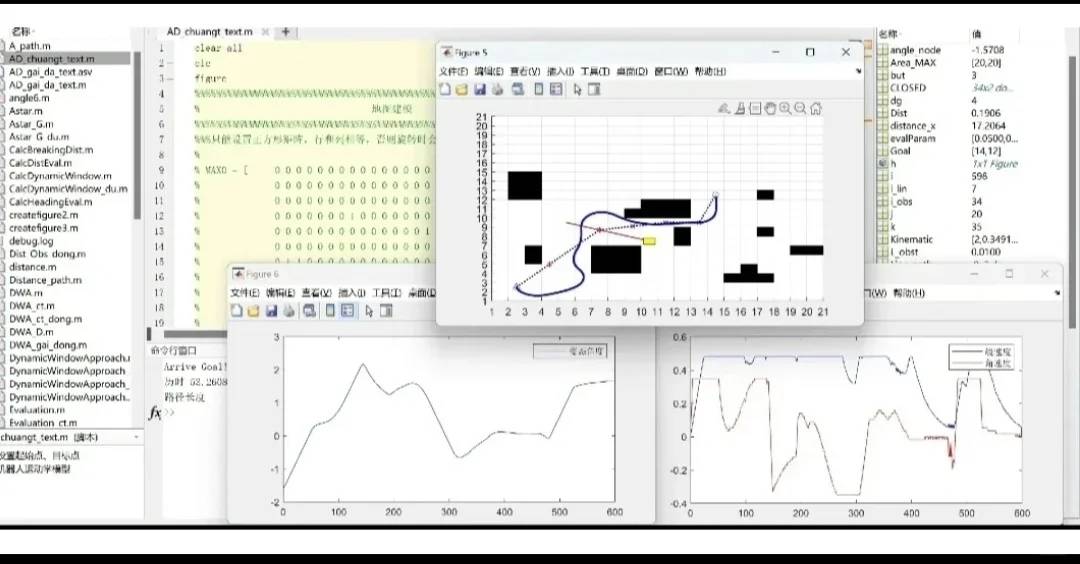
- スムーズな運用のために最も効率的なDEGWOコストを計算する。 - 実際の実装に役立つxyz三次元形式でパス座標をエクスポートする。
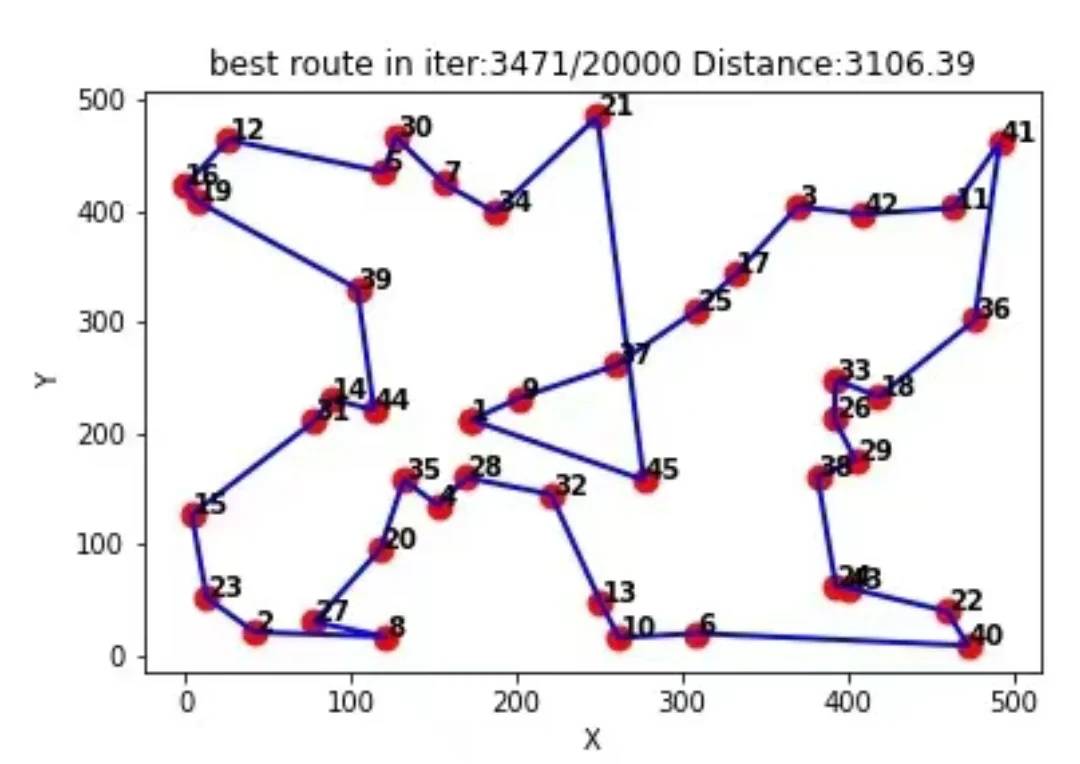
2. 旅行商問題の解決 - 正確な結果を確保するためにアルゴリズムパラメーターを最適化する。 - オプティマルパスを明確なビジュアルで表示し、容易に解釈できるようにする。 - 反復曲線を分析し、反復回数とフィットネス関数値の関係を示す。 - 開始点と終了点をマークしてパス座標をエクスポートし、スムーズな実行を可能にする。
3. VMD信号分解の最適化 - 優れた信号クリアさを達成するためにアルゴリズムパラメーターを改良する。 - コンテキストと比較のために元データを提示する。 - 反復曲線を監視し、反復回数とフィットネス関数値をリンクさせて透明性を提供する。 - 詳細な洞察とともにVMD分解結果を示す。 - 最適なアルファと理想的な分解数(K)を含む計算結果を強調し、具体的な結論を得る。
この記事、とても興味深かったです!DEGWOコストの最適化手法が特に参考になりました。実際にGUIで視覚的に経路を調整できるのは、実践的なツールとして強力ですね。今後、リアルワールドでの適用例も読んでみたいです。
ドローンの経路最適化アルゴリズムの調整方法が具体的に書かれていて参考になりました。特にコスト関数のペナルティ設定は実際に飛ばす時に重要そうですね。3Dルートの可視化機能があると、地形の高低差も考慮できて便利だと思います。