Planification des trajets pour UAV : Algorithmes avancés d'optimisation de chemins pour drones
Code d'opération du programme et conception de l'interface graphique utilisateur
1. Planification des trajets pour les drones - Visualiser le schéma de la carte pour une compréhension intuitive du trajet. - Affiner les paramètres de l'algorithme pour améliorer la précision. - Ajuster la fonction de coût pour un meilleur rendement en mettant l'accent sur les pénalités. - Explorer le trajet en 3D et le plan de l'étage pour une vue complète. - Tracer les courbes d'itération pour suivre la convergence vers la solution optimale.
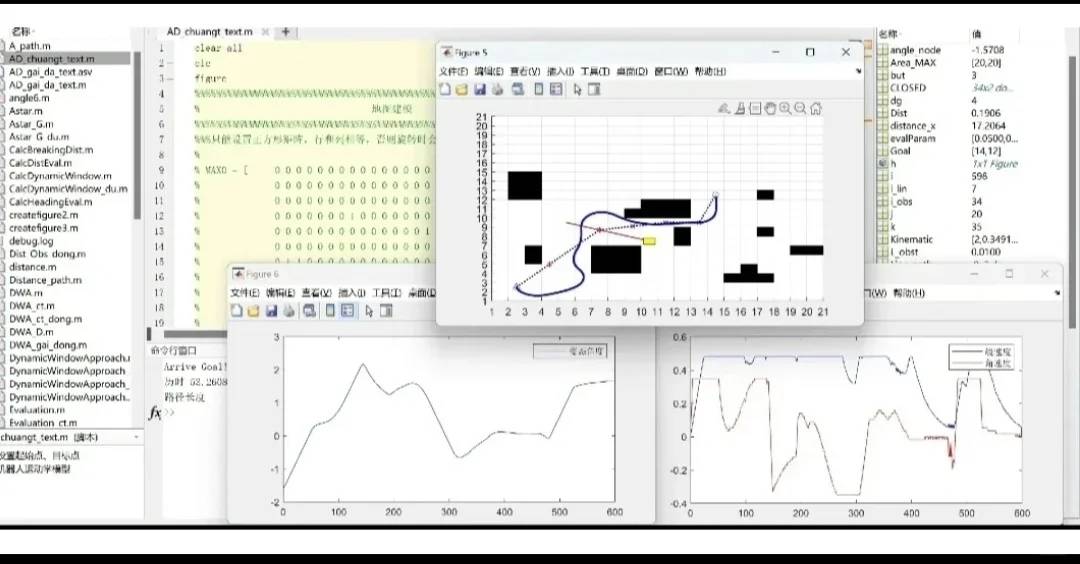
- Calculer le coût DEGWO le plus efficace pour des opérations fluides. - Exporter les coordonnées du chemin au format xyz tridimensionnel pour une mise en œuvre pratique.
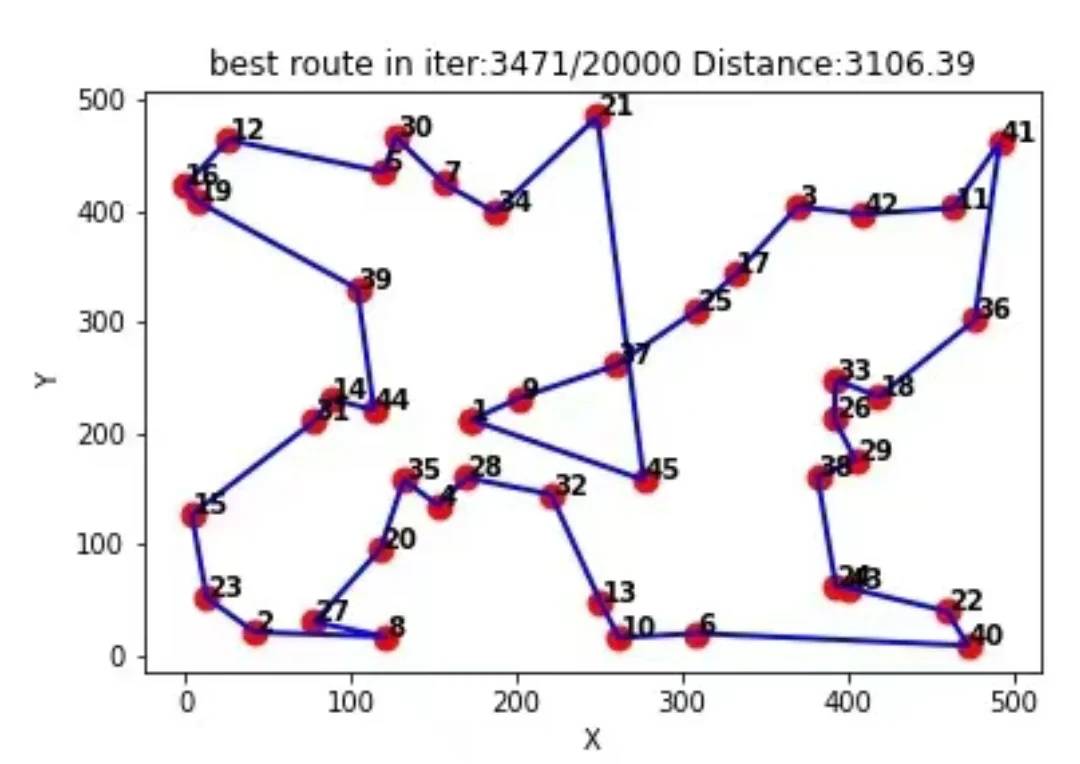
2. Résolution du problème du voyageur de commerce - Optimiser les paramètres de l'algorithme pour garantir des résultats précis. - Afficher le trajet optimal avec des visuels clairs pour une interprétation facile. - Analyser la courbe d'itération, montrant la relation entre le nombre d'itérations et les valeurs de la fonction d'aptitude. - Exporter les coordonnées du chemin, en marquant à la fois le point de départ et le point d'arrivée pour une exécution fluide.
3. Optimisation de la décomposition VMD - Affiner les paramètres de l'algorithme pour obtenir une clarté de signal supérieure. - Présenter les données d'origine pour le contexte et la comparaison. - Surveiller la courbe d'itération, liant le nombre d'itérations aux valeurs de la fonction d'aptitude pour une transparence. - Montrer les résultats de la décomposition VMD avec des informations détaillées. - Mettre en évidence les résultats du calcul, y compris l'alpha optimal et le nombre idéal de décompositions (K), pour des conclusions actionnables.
C’est vraiment intéressant de voir comment ces algorithmes optimisent les trajets pour les drones. J’ai particulièrement apprécié la partie sur l’ajustement des paramètres et la visualisation en 3D, ça rend le processus très accessible. Je me demandais cependant si ces méthodes fonctionnent aussi bien dans des environnements plus complexes avec beaucoup d’obstacles dynamiques.