تخطيط مسارات الطائرات بدون طيار: خوارزميات تحسين المسارات المتقدمة للطائرات من دون طيار
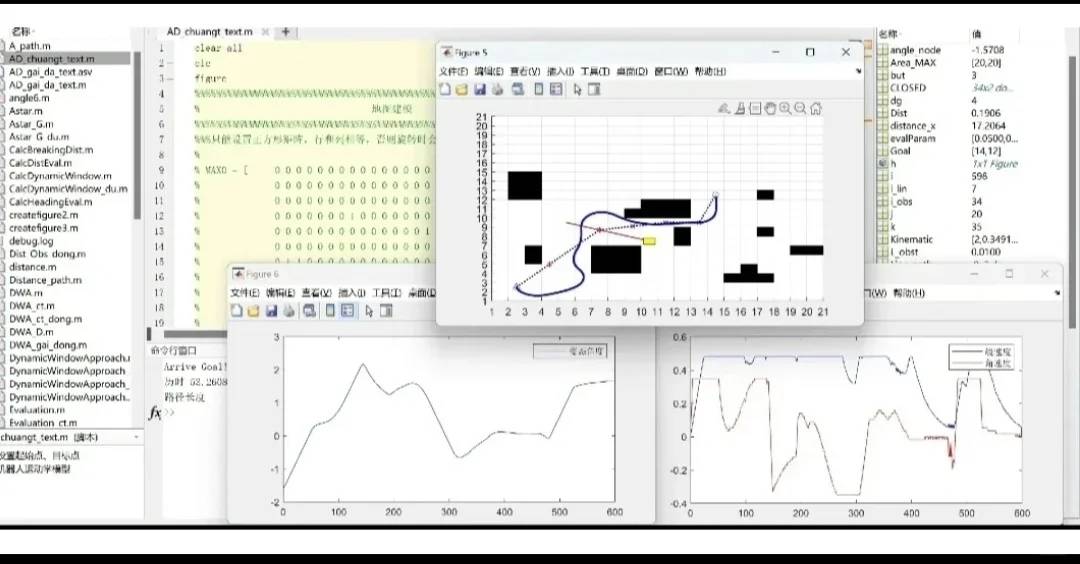
رمز تشغيل البرنامج وتصميم واجهة المستخدم الرسومية للتفاعل
1. تخطيط مسار الطائرة بدون طيار - رؤية الخريطة الشكلية لفهم المسار بصريًا. - تعديل معلمات الخوارزمية لتحسين الدقة. - تعديل تركيز دالة التكلفة لتحقيق أداء أفضل. - استكشاف المسار ثلاثي الأبعاد ورسم الخرائط الداخلية للحصول على رؤية شاملة. - رسم منحنيات التكرار لمتابعة التقارب نحو الحل الأمثل.
- حساب تكلفة DEGWO الأكثر كفاءة لتيسير العمليات. - تصدير إحداثيات المسار بتنسيق ثلاثي الأبعاد xyz للتنفيذ العملي.
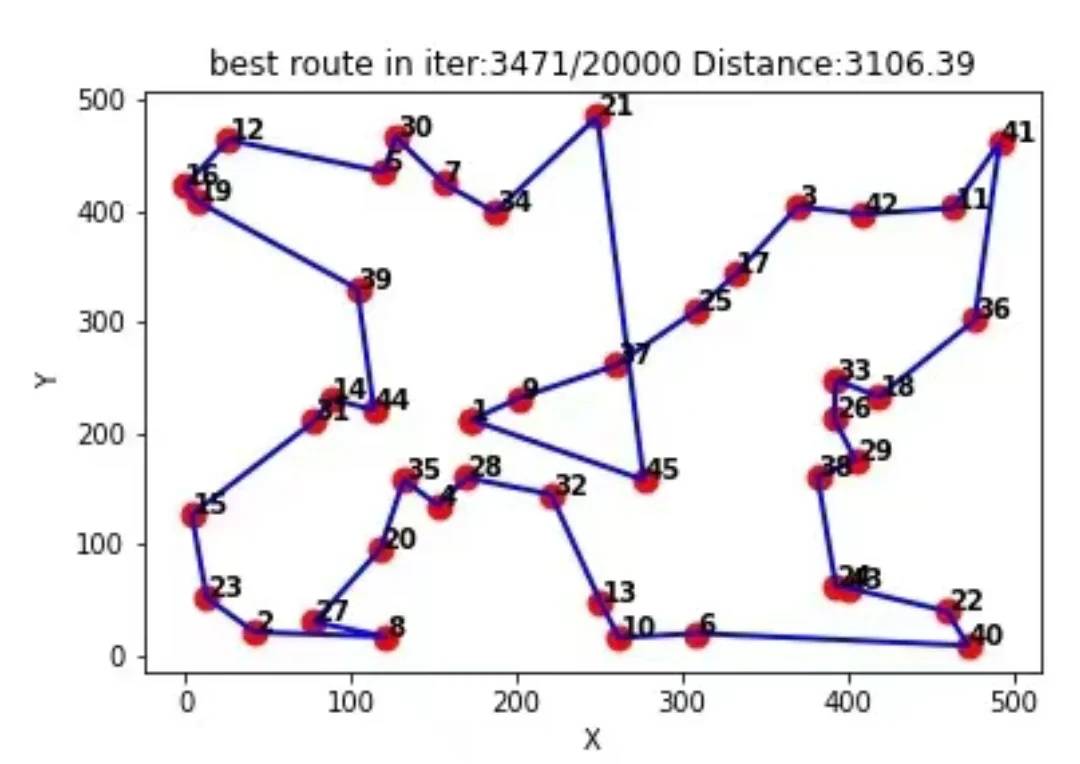
2. حل مشكلة البائع المتجول - تحسين معلمات الخوارزمية لضمان نتائج دقيقة. - عرض المسار الأمثل برسومات واضحة لسهولة الفهم. - تحليل منحنى التكرار، الذي يوضح العلاقة بين عدد التكرارات وقيم دالة اللياقة البدنية. - تصدير إحداثيات المسار، مع تحديد نقاط البداية والنهاية لتنفيذ سلس.
3. تحسين تحليل تجزئة الإشارات باستخدام VMD - تحسين معلمات الخوارزمية لتحقيق وضوح إشارة متفوق. - تقديم البيانات الأصلية في السياق للمقارنة. - مراقبة منحنى التكرار، الذي يربط عدد التكرارات بقيم دالة اللياقة البدنية للشفافية. - عرض نتائج تجزئة VMD مع تفاصيل مفصلة. - تسليط الضوء على نتائج الحسابات، بما في ذلك alpha الأمثل وعدد التجزئات المثالية (K)، لتحقيق استنتاجات عملية.
الخوارزميات الجديدة لتخطيط مسارات الطائرات بدون طيار فعلاً مبهرة! خاصة فكرة تعديل معايير الخوارزمية لتحسين الدقة. هل يمكن تطبيق هذه التقنيات على طائرات التوصيل في المناطق الحضرية؟ أتمنى لو تشرحون أكثر عن كيفية عمل منحنيّات التقارب في المقال القادم.